在社交媒体上共享
无人驾驶,还有多远?
发表 2013/01/03
【按】美国V2X车联网,要求识别哪条车道、哪一辆车,可以借鉴。关键词导航定位1.5米精度。
按照中国国家标准,三级以上多车道公路每条机动车道宽度为3.5~3.75米,和全世界通用标准相差无几,城市道路每车道宽度为3.5米,交叉路口分流车道每车道为2.3-2.5米,干线公路(包括高速公路)每车道宽为3.75米,路肩(高速公路紧急停车带)为1.5-2.5米。 高速公路收费站每车道宽度为2.5米~3.5米。
车辆本身宽度,日本系车的宽度是1695mm、1795mm,德系车、美系车的车身宽度多数都在1800mm以上。多数GPS模块、GNSS模块做不到道路识别、车辆识别的精度。
车联网要改变思路。多数车机、Telematics厂商热衷于过去的成功经验、用过去熟悉的GPS模块,殊不知达不到识别车道、识别车辆的精度要求,然并卵;此外,现有通信基础设施,常被直接应用于车联网中,如移动通信网(中移动、联通、电信)充当数据传输和互联网通信手段,这就好比在高铁站、火车站打电话、连网老掉线(用户多通信塞车)。所以有DSRC短距离专用通信标准提出。
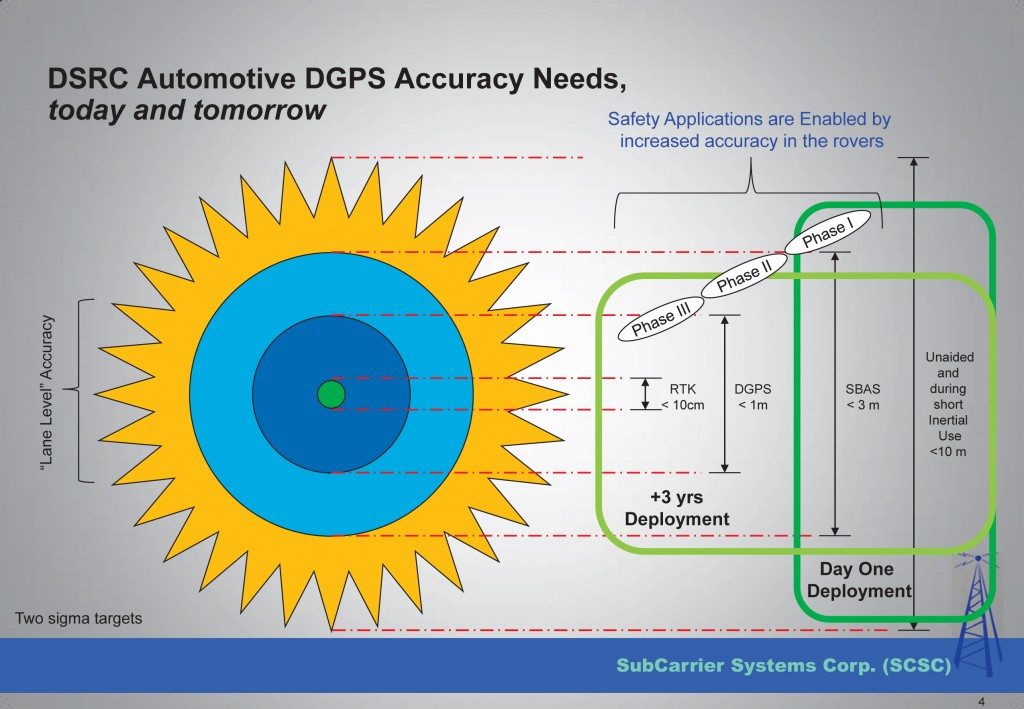
我们2014年在北京,实际测试(100Km/h)以下,NV08C-CSM v5 GPS+北斗模块及天线定位准确度1.5米,在行驶中定位准确度保持在1.5~2米,可以确保识别是在哪一条车道(车道3.5~3.75米宽)上、是哪一辆车(车宽1.7~1.8米)。
多数人对ADAS(Advanced Driver Assistance Systems辅助驾驶技术)的理解,停留在基于视觉技术防撞警告、车道偏离警示等;实际上V2V/V2I + 新型无线技术才是下一代的ADAS。当然,多种传感器结合、有赖无线技术提升,可能是系统发展途径。最新情况是,中国正在研究第5代移动通信5G技术作为通信平台。
从防撞系统、半自动驾驶、全自动驾驶,从驾驶员驾驶车辆违法到无车,还有相当长的路要走。选用高准确度GNSS定位模块、高性能天线,以及惯性导航模块等核心模组十分关键。


先看4则媒体消息:
人民网 2015年05月14日《首辆无人驾驶卡车获行驶许可证》
戴姆勒汽车公司的Freightliner无人驾驶货车获得了美国内华达州官方的行驶许可证,这也是全球首辆获得无人驾驶许可证的重型卡车。
新车具有自动驾驶功能,但它并不能完全实现自动驾驶。它不会变线,不会自行超车,它仅能在高速公路上接管操控并保持自适应巡航的状态,而且该技术不能自行处理复杂的路面状况,例如前方道路上有积雪覆盖时,仪表盘上的图标会自动闪烁并伴有蜂鸣声来提醒驾驶员介入。如果驾驶员未在5秒内对车辆做出调整,车辆会逐渐放慢速度直至完全刹停。
新车的自动驾驶技术来源于奔驰卡车的自动驾驶技术,在它的车头安装有短程和长程雷达用来识别前方的障碍物,另外还装有一枚立体摄像头用来识别车道。
腾讯科技2015年7月26日《戴姆勒计划今年在德国测试无人驾驶卡车》。“我们非常乐观地认为,在未来几个星期内,我们将获得相关机构的批准,以便让我们在德国高速公路上测试无人驾驶卡车服务。
”
新浪科技2015年10月13日《新加坡将发展无人驾驶公交车》。未来新加坡将投放无人驾驶公交车,而卡车也将集成自动驾驶技术。
韩国中央日报中文网2015年12月22日《板桥城市中心将建世界上首个自动驾驶汽车道路》。自动驾驶汽车在行驶道路上前行时,通过卫星定位系统(GPS)和自身传感器等获取交通信号和其它车辆及地形地物等信息。


IVC、V2V、V2I概念的提出
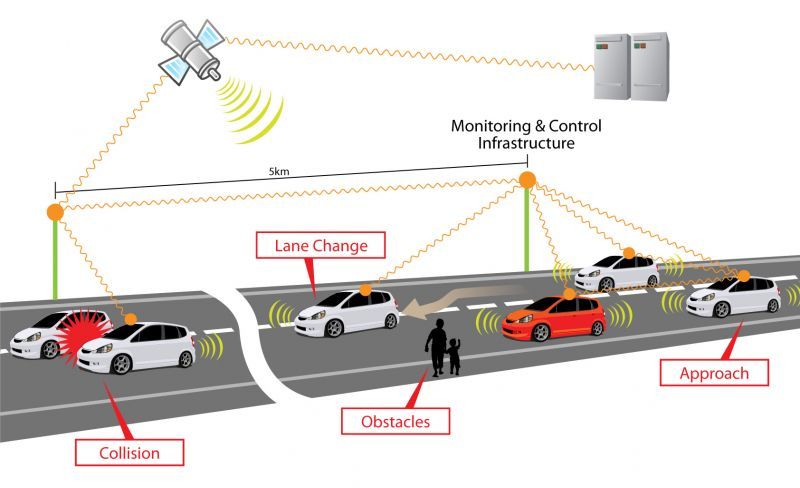
IVC(车辆间通信)系统的提出是为了增加旅客的安全性,减少燃料消耗和污染,并保持车辆之间以及车辆到基础设施的连接。
V2V即车与车之间的通信,V2I即车与基础设施、互联网之间的通信。V2V系统为了安全应用,V2I系统主要是为了支持方便的应用,包括个人通信,移动办公,远程信息处理,基于位置的信息,与汽车相关的移动服务,视频直播,和互联网接入。未来的安全应用,包括从事故现场和其他执法应用的实时多媒体传输,预计从V2I连接中受益。
车对车( V2V )网络:有效利用无线频谱是实现基于V2V通信系统的应用是至关重要的。虽然IEEE 802.11已被选定为DSRC(专用短距离通信)规范基础和IEEE导入DSRC标准化的IEEE 802.11p工作组,在DSRC频谱(5.9Ghz)使用IEEE 802.11a解决方案的适用性仍在讨论。 V2V网络不同于无线临时网和蜂窝系统,显著特点是资源的可用性和移动性。因此,采用现有的无线网络解决方案,这样的环境可能会导致延迟,吞吐量和公平性性能低。因此,我们探讨新的MAC层协议的单播和广播通信,它们适应多通道DSRC环境,支持多媒体应用,以及特殊应用协议优化。这些解决方案旨在支持不同的可靠性和延时等级,并只占用最小的网络资源。
车辆到基础设施(V2I)网络:目前文献中建议车载网络集成到互联网中。然而,车辆和网关之间信息传送的详细解决方案却在很大程度上被忽略。
V2V系统解决方案的提出,是预计V2I通信因为网关交通密集而表现不佳。此外,没有任何现有的解决方案,能让各方透过多路径公平地达到中央网关。
在这个项目中,我们开发了多路径通信协议来连接车辆与基础设施的网关,同时支持高吞吐量、低时延和公平地获得可用资源。此外,我们还研究网关切换,接入点选择和通信的服务差异化,在稀疏的V2I网络中的部署问题,道路网络之间的延伸。
美国交通部(DOT)、美国国家公路交通安全管理局(NHTSA)
2014年8月DOT(美国交通部)报告:《V2V通信:V2V技术应用准备就绪》主要是针对美国的报告,同时
介绍了其它地区的情况。亚洲:日、韩走在开发、应用前列,都支持电子道路系统收费5.8Ghz频段,但日本
丰田等车厂760Mhz、将支持双频段,中国还没决定频段;欧洲:有明确时间表2015年基于V2I应用,5.9Ghz频段。
2013年12月 即将离任的美国国家公路交通安全管理局(NHTSA)局长David Strickland宣布,该局计划推出车到车(vehicle-to-vehicle,简称V2V )通信和高级制动系统。这位局长并未透露NHTSA的这一项目最终是否会强制有汽车都要采纳自动刹车或v2v通信功能。在大卫·斯特里克兰的领导,NHTSA起草并完成了关于分心驾驶、电动汽车、自动驾驶汽车的法规。
据悉,高级刹车系统中采用了一种探测传感器,它可以预测汽车在遇到行人或前方忽然出现一辆汽车
时是否可能会发生车祸,并在作出判断之后采取紧急刹车措施。
至于v2v通信系统,其将采用Wi-Fi实现车主之间的通信。通过该系统,车主们可以相互交流路况,从而
可以避开一些车流量高或发生了事故的地方。
很多汽车制造商已经在新车制造中加入了v2v通信系统。据悉,已经有10家大型汽车制造商和技术公司跟
NHTSA的连接车辆研究项目组合作,在密歇根安阿伯市进行v2v试点研究。
目前,NHTSA唯一强制汽车制造商们在防止汽车发生碰撞中所采取的系统是电子稳定系统。
密歇根大学研究摩托车导入车联网
密歇根大学交通研究所( UMTRI )推出摩托车研究,作为美国安全试验示范计划(US Safety Pilot Model Deployment)一部分,以确定轿车、卡车和公共汽车如何采用V2V (车对车)通信技术,与摩托车互动。 UMTRI与摩托车制造商本田和宝马合作,在密歇根州安阿伯引入摩托车到车联环境中进行概念性验证,在项目的研究领域完成2项任务。连接的摩托车将参与摩托车通信可行性的测试和摩托车到车辆( M2V )通信性能测试。据美国国家公路交通安全管理局(NHTSA )的数据,摩托车事故占所有公路死亡人数的5% ,但80 %的事故导致人身伤害或死亡,相比之下,汽车占20%。
车联网技术还解决了这些易受伤害的道路使用者,这点非常重要。摩托车在美国运输部的整体安全策略中占重要位置。
该V2V连接车辆设备是由Cohda提供,内含恩智浦软件定义的无线电芯片RoadLINK芯片组和运行车联通信的Cohda固件,卫星导航精确定位模块为NV08C-CSM。
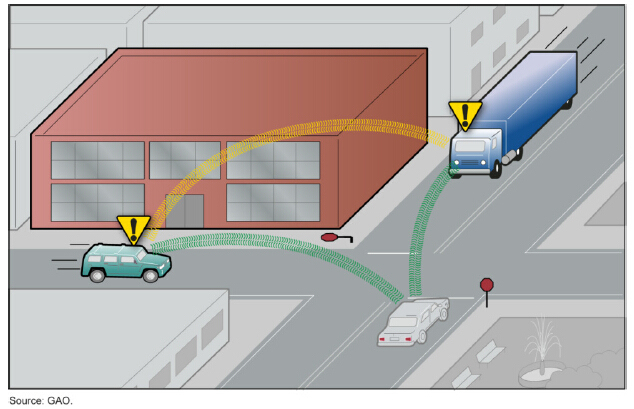
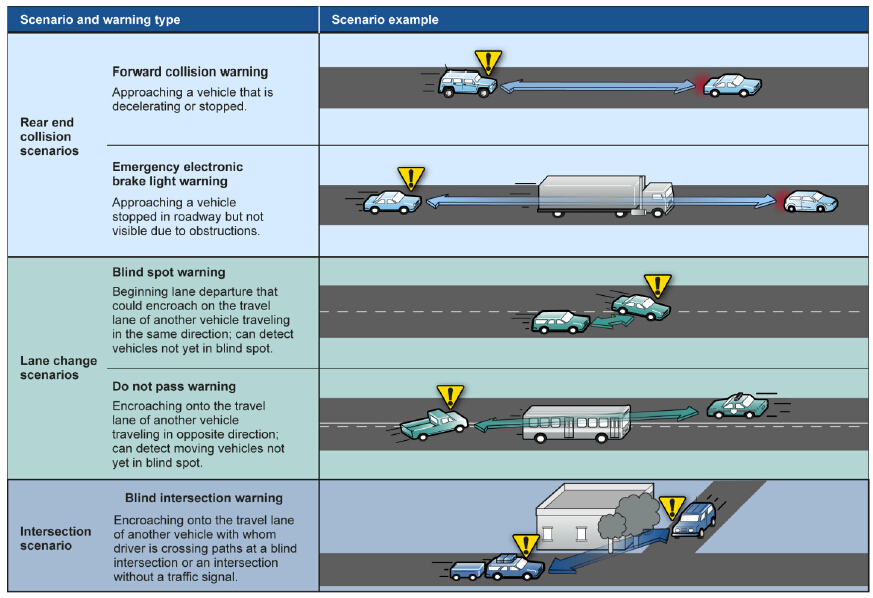
V2V通信,即使在城市环境中建筑阻挡司机在路口看见对方,车辆能够互相通信。在这些安全苛刻场景,车联技术可喜扩展到弱势道路使用者,如摩托车手和行人。
摩根士丹利“自动驾驶汽车”研究报告
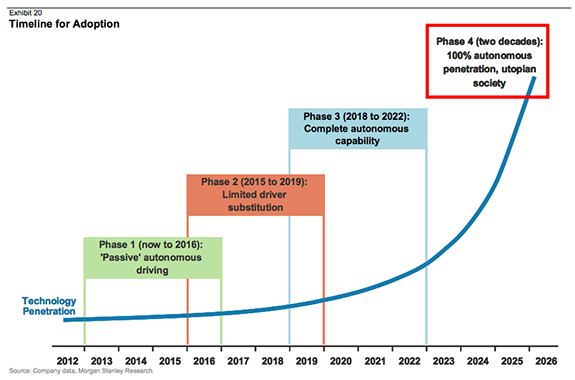
摩根士丹利研究部2013年11月6日发布了一份109页名为《自动驾驶汽车:汽车业新典范》的蓝皮书报告,10个全球研发团队经过了几个月采访未来学家、汽车行业高管和业外潜在颠覆者。
蓝皮书提到过去50年的技术、自动驾驶车的历史、2005年DARPA地面车优胜者、卡车无人驾驶、域控制器执行中央控制、未来无人驾驶汽车。认为,硬件技术已经成熟,关键要做的是软件、算法。
蓝皮书还介绍了加速度传感器、执行器-控制转向器和其他机械动力传动系统部件、汽车雷达系统、常规系统、雷达成像下的车周边3D轮廓、单视镜、汽车碰撞情形与V2V应用。
自动驾驶车,长期被认为是科幻小说的东西,由于人力和经济上的原因将成为现实 。该报告预示着由于几乎完全消除汽车交通事故,将大大减少人类死亡和痛苦,由于降低医疗成本、减少拥堵、节省燃油和提高生产力,仅在美国每年可节省1.3万亿美元——占GDP的比例约为8%。“现在我们清楚地看到,不仅是自主汽车真实的,但他们很可能会比大多数人想象的更早来到我们身边 ”
报告说。 “
自主汽车路线图:基本的自主能力今天已经实现,半自主能力在未来12-18个月内实现,全自主能力(已经有原型机)商业化在2020年实现。
摩根士丹利的报告描述了恩智浦(NXP)作为车载网市场领导者,与思科系统公司(CISCO System)战略性投资了V2X(车辆与车辆、车辆到基础设施)通信技术公司。
V2X通信是自主汽车的关键技术,“自主车辆需要可靠的传感器来发挥自己的潜力”,Cohda公司CEO保尔-盖利说。
“ V2X是一个无线传感器系统,使车辆与其他周围的车辆分享他们的传感器数据。作为标准传感器,如雷达、光学、超声波和激光雷达所有都是视线,他们只能检测到可见的风险。
“ Cohda的V2X技术为非视觉传感器具有360度的感知。它可以检测到隐藏于视觉外的威胁,因此它可以扩展感知范围,超出了驾驶员视野。
“这很重要,V2X系统是可靠的,譬如两辆车行驶在一条直路上,当两辆车相互接近时存在死角,在丘陵的坡峰,在高速公路上行驶,或当车车之间有卡车行驶。”
摩根士丹利的报告还指出,自主驾驶能力可能会改变汽车业的基本面,如车的“价值” 从硬件转移到软件、组件,以及,新玩家进入市场,并迫使现有选手彻底改造自己或放弃份额。恩智浦半导体高级副总裁、汽车娱乐业务部总经理托斯滕-雷曼表示,恩智浦针对V2X有RoadLINK 芯片组。 “
Cohda的在最艰难的V2X方案以领先的性能令人信服。恩智浦RoadLINK芯片组,其成熟的软件定义无线电捆绑Cohda的算法,提供当今最先进的汽车V2X解决方案,”他说。
思科系统公司产品管理总监安德烈亚斯·麦说“'物联网'何以改变我们的生活,V2X技术是一个很好的例子”。
Cohda的V2X解决方案使车辆相互沟通,让司机和最终自主驾驶车一些
额外的预警时间,可以防止迫在眉睫的撞车事故, ”他说。Cohda的无线制造V2X系统与世界最佳的性能,能够检测出隐藏的威胁,比任何其他系统更好。
全球范围大约有一半参与V2X试验的车辆安装了Cohda的设备,包括美国重要的安全试验示范计划(SPMD,Safety Pilot Model Deployment )即2800辆车中1500辆。
GPS模块选用的是精度达1.5米(RMS 65%可靠性)的NV08C-CSM。
注意,2.5米CEP(50%可靠性)精度的GPS模块是不适宜的。
车辆感知设备VAD、后装安全设备ASD、数据采集系统DAS
Cohda Wireless公司基于NXP的在DSRC频率(5.9Ghz)工作的802.11p芯片,以及NV08C-CSM GPS/GNSS模块 开发了系列车联网设备: VAD是一个无线设备,安全和私密地传输您的车辆的速度和位置给在邻近地区其他车辆。VAD安装在车辆Cohda MK5-OBU 座椅,GPS天线安装在有涂漆保护层后备厢厢盖上。
ASD类似于VAD,但它也接收来自其他车辆的速度和位置的数据。如果存在撞车的威胁,它利用对其他车辆的位置信息提供给驾驶员音频警告。安装几乎与VAD相同,但包括一个用作声音警告的小型隐藏式音箱。
除了ASD,还有一个DAS收集视频和驾驶员操作数据,使研究人员可以了解驾驶员与ASD的交互情形以及撞车警告出现时他们如何回应。数据保存仅供研究人员使用。DAS单元安装在车辆的后备厢中。Cohda MK5-RSU VAD车辆感知设备、ASD后装安全设备,标准IEEE 802.11p - 2010 IEEE 802.11an - 2012、ETSI ES 202 663、IEEE 1609 - 2010、ARIB STD - T109 - 2012、SAE J2735 - 2009;1GHz ARM Cortex-A9多核处理器;Linux 3.4操作系统;移动及多径容差:多普勒传播速度800Km/h、延时1500纳秒;NV08C-CSM GNSS定位精度1.5米,自2013年开始供应美国V2V市场,2014年批量出货。
(引用美国DOT/NHTSA、摩根斯坦利报告、密歇根大学交通研究所等内容、数据,及网上图片,致谢原作者。2016年12月编辑。)